Le véhicule du futur verra aussi la route à travers les yeux de l’infrastructure et des autres véhicules
⏱ 4 minToujours plus autonome, le véhicule du futur sera aussi très communicant, pour percevoir son environnement au-delà de l’horizon de ses propres capteurs, via ceux de l’infrastructure routière et des autres véhicules.
Les réflexions sur le transport routier du futur ne datent pas d’hier. Ainsi, de 1987 et 1995, le programme européen Prometheus (PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety) a exploré des pistes pour améliorer son efficacité et sa sécurité grâce aux technologies de l’information. L’idée de la délégation de conduite était déjà en l’air, mais on évoquait surtout un dialogue entre « véhicule intelligent » et « route intelligente ». Si aujourd’hui on entend surtout parler de voiture autonome, il est toujours question de s’appuyer également sur une « route du futur », une infrastructure routière dotée d’équipements – capteurs, logiciels, télécoms – destinés à sécuriser et réguler le trafic.
En France, l’Ifsttar (Institut français des sciences et technologies des transports, de l’aménagement et des réseaux, désormais Université Gustave-Eiffel) a lancé en 2013 le projet « Route de cinquième génération » (R5G), en connexion avec le programme européen Forever Open Road du Forum of European National Highway Research Laboratories (Fehrl). Le propos est plus vaste que celui de la conduite déléguée : sont aussi abordées les questions énergétiques, environnementales, etc. Mais l’information et les données sont au centre de la démarche. Notamment la perception de l’état des routes, du trafic… et la communication avec les véhicules.
Une perception augmentée par les informations issues de l’infrastructure
Mais quelle importance et quel rôle attribuer respectivement à la voiture et à l’infrastructure du futur ? Nicolas Hautière, directeur adjoint du département Composants et systèmes de l’Ifsttar, est directeur du projet R5G. « Sur ce sujet, selon les pays, on constate des différences de points de vue qui relèvent du culturel. Alors qu’aux États-Unis, on aurait tendance à compter essentiellement sur les capacités du véhicule, et donc à se reposer modérément sur les communications avec l’infrastructure, c’est le contraire en Chine, où l’on met l’accent sur cette dernière. En Europe, on adopte en général une position intermédiaire. »
Le dialogue entre route et véhicule, remarque Nicolas Hautière, ne se résume pas à l’échange électronique d’information : « Dès lors que le véhicule autonome interprète la signalisation, on doit par exemple se poser la question du niveau de maintenance des lignes blanches. Mieux, la signalisation et les capteurs qui vont la détecter devraient logiquement être repensés ensemble, l’un pour l’autre. »
La voiture du futur, bardée de capteurs et d’algorithmes pour percevoir directement son environnement, devrait donc en plus disposer d’informations venues d’ailleurs et donc en quelque sorte percevoir, par délégation, au-delà de l’horizon de ses propres capteurs. Par exemple, un carrefour équipé de caméras et d’autres capteurs, d’une informatique et de télécoms ad hoc, fournira des informations relatives aux éventuels véhicules en approche sur la ou les autres routes menant à l’intersection. On peut parler de perception augmentée, grâce à cette communication avec l’infrastructure, que l’on désigne par le sigle V2I (pour Vehicle to Infrastructure).

Équipement (Road Side Unit) de télécommunication V2I (Vehicule to Infrastructure). © Cohda Wireless
La communication entre véhicules permet une perception collaborative
Mais puisque la voiture de demain est décidément communicante, on songe aussi à la faire dialoguer avec les autres véhicules : c’est le V2V (Vehicle to Vehicle). Et comme bien d’autres formes de communications sont envisagées, comme le V2P (Vehicle to Pedestrian) avec les piétons, ou le V2D (vehicle-to-device) avec d’autres types d’appareils, on parle désormais de V2X (Vehicle to everything), pour n’importe quel type d’objet connecté. « Les lidars actuellement considérés dans le milieu automobile ont une portée théorique d’environ 200 mètres, et donc une capacité de détection des obstacles se situant à des distances souvent bien inférieures, explique Guillaume Bresson, directeur du domaine Véhicules autonomes et connectés à l’institut Vedecom. Ce n’est pas suffisant à grande vitesse. L’information provenant d’un véhicule situé en avant, ou de l’infrastructure, peut donc s’avérer utile. On parle de perception collaborative ou de perception coopérative, résultant d’échanges de messages. »

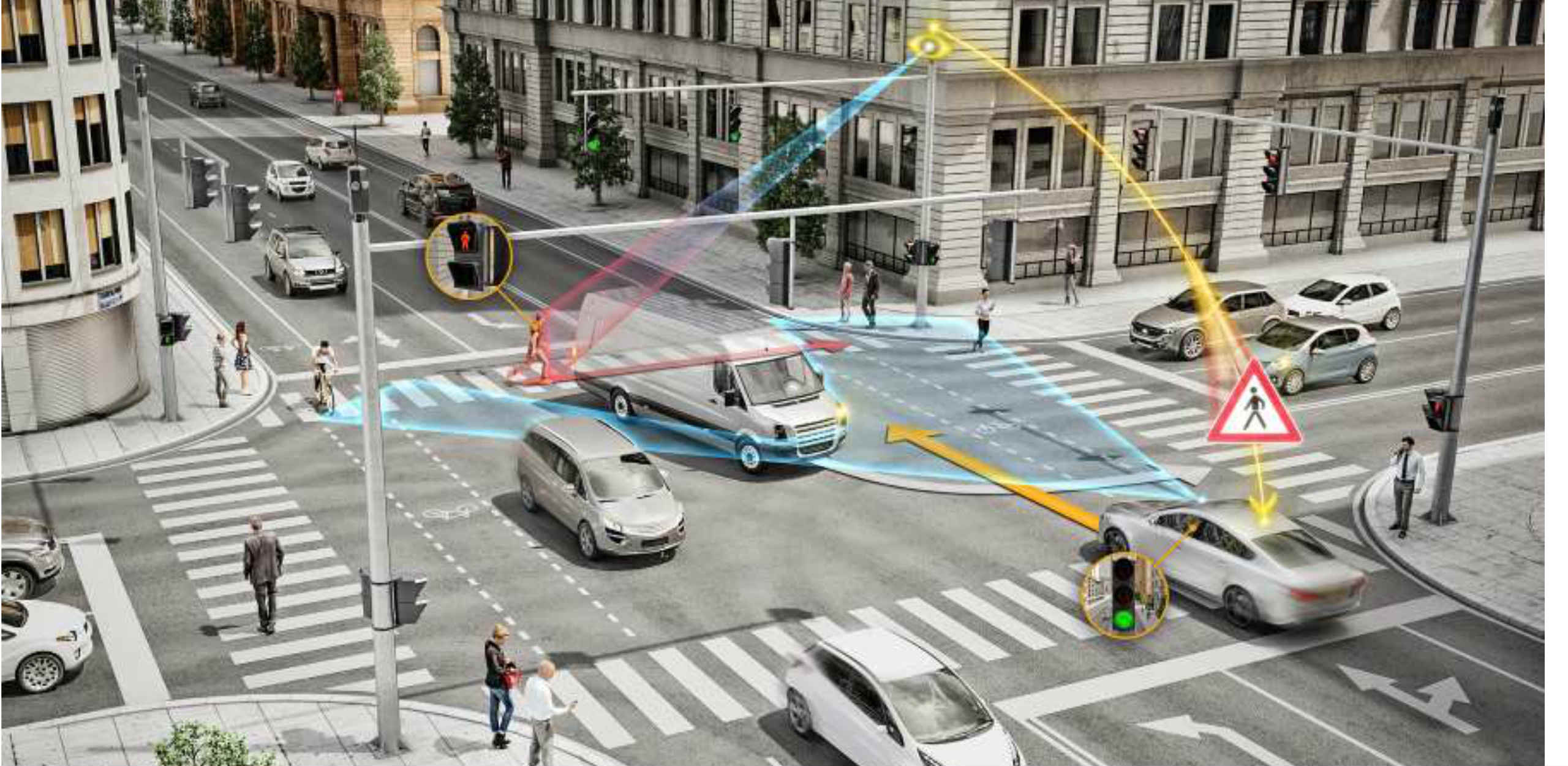
Les communications V2I (Vehicule to Infrastructure) et V2V (Vehicule to Vehicule) permettent de réguler et sécuriser les intersections. © Autotalk.
Se pose bien sûr la question du degré de confiance que le véhicule autonome doit accorder à cette perception par délégation. « Il n’est pas possible de prendre pour argent comptant les données issues de communications avec l’infrastructure ou les autres véhicules, estime Arnaud de La Fortelle, directeur du centre de robotique de Mines ParisTech, ou sinon il faudrait les certifier, ce qui est coûteux. Je ne crois donc pas aujourd’hui à l’usage de ces données pour le contrôle direct du véhicule. Celui-ci doit décider seul, mais il doit aussi profiter de l’information fournie par l’infrastructure pour optimiser la conduite. Par exemple, si l’on sait que le prochain feu rouge doit passer au vert dans 7 secondes, ou dans 50, on peut exploiter cette information pour optimiser la décélération. De même, la communication entre véhicules peut permettre de signaler un piéton dissimulé, et augmenter la vigilance du véhicule. »
« La communication avec l’infrastructure et entre véhicules permet d’envisager une fluidification du trafic, et donc une optimisation du transport routier, poursuit Fawzi Nashashibi, le responsable de l’équipe-projet RITS (Robotics and Intelligent Transportation Systems) à l’Inria. On imagine par exemple la formation de convois, sur autoroute. Le véhicule de tête, en fonction de la situation qu’il observe et informé par l’infrastructure, fixe la vitesse, et les autres le suivent. C’est ce que l’on appelle le “platooning” (peloton). Je suis intimement convaincu que le véhicule autonome et la route intelligente vont de pair. »
Pierre Vandeginste
Illustration à la une :
Exemple de communication V2I (Vehicule to Infrastructure) : un carrefour communicant, équipé de caméras, détecte un piéton qui traverse et le signale à une voiture (à droite) qui ne peut le voir, car il est occulté par une camionnette. © Continental