La voiture autonome sera forcément communicante
⏱ 6 minLes capteurs et les algorithmes embarqués dans les voitures sans pilote ne suffiront pas. Pour pouvoir rouler avec plus de sécurité et d’efficacité encore, celles-ci devront également recevoir des informations des autres véhicules et de l’infrastructure routière.
Le 7 mai 2016, un Américain trouvait la mort au volant de sa Tesla sur laquelle il avait enclenché le pilote automatique. L’enquête a révélé que l’accident, le premier impliquant une voiture autonome – de niveau 2 selon la classification, lire l’encadré à la fin de l’article « Voiture autonome : un déluge de données à interpréter », était dû à une erreur de capteurs : les caméras, éblouies par le soleil, n’ont pas vu le camion qui traversait la route. Les progrès en matière de capteurs et d’intelligence artificielle vont bien sûr permettre d’améliorer la sécurité. Mais cela ne suffira pas : pour compléter une information ou pallier un manque, les voitures sans pilote devront en plus communiquer avec leur environnement. Par exemple, si des caméras de surveillance avaient repéré le camion et alerté la Tesla, ou si d’autres véhicules, ou le camion lui-même, lui avaient transmis cette information, la voiture aurait pu réagir à l’avance et éviter l’accident.
Aujourd’hui, tous les spécialistes sont d’accord sur ce point : pour pouvoir être totalement autonome, la voiture intelligente devra forcément communiquer – coopérer – avec l’infrastructure et les autres véhicules. « Une voiture qui roulerait uniquement avec ses capteurs serait trop limitée en termes de portée de détection et de visibilité des objets à détecter », souligne Jean-Marie Bonnin, de l’Institut Mines-Télécom. Les voitures autonomes devront être coopératives.
Diverses solutions selon les situations
Sur autoroute, elles pourront ainsi être prévenues par le centre de contrôle de la formation d’un bouchon ou de la survenue d’un accident et adapter alors automatiquement leur itinéraire. Des informations plus sensibles, comme la présence d’un animal sur la route ou l’arrêt d’une voiture sur la bande d’arrêt d’urgence, pourront aussi leur être transmises. Dans certains cas, ce sont même les voitures elles-mêmes qui recueilleront ces informations grâce à leurs capteurs et les communiqueront aux autres. Pour optimiser les déplacements, on imagine faire circuler les voitures autonomes en convoi, très proches les unes des autres. Pour qu’elles conservent précisément la même distance entre elles ou que le convoi se scinde pour laisser entrer ou sortir un véhicule, les voitures devront en permanence »discuter » entre elles.
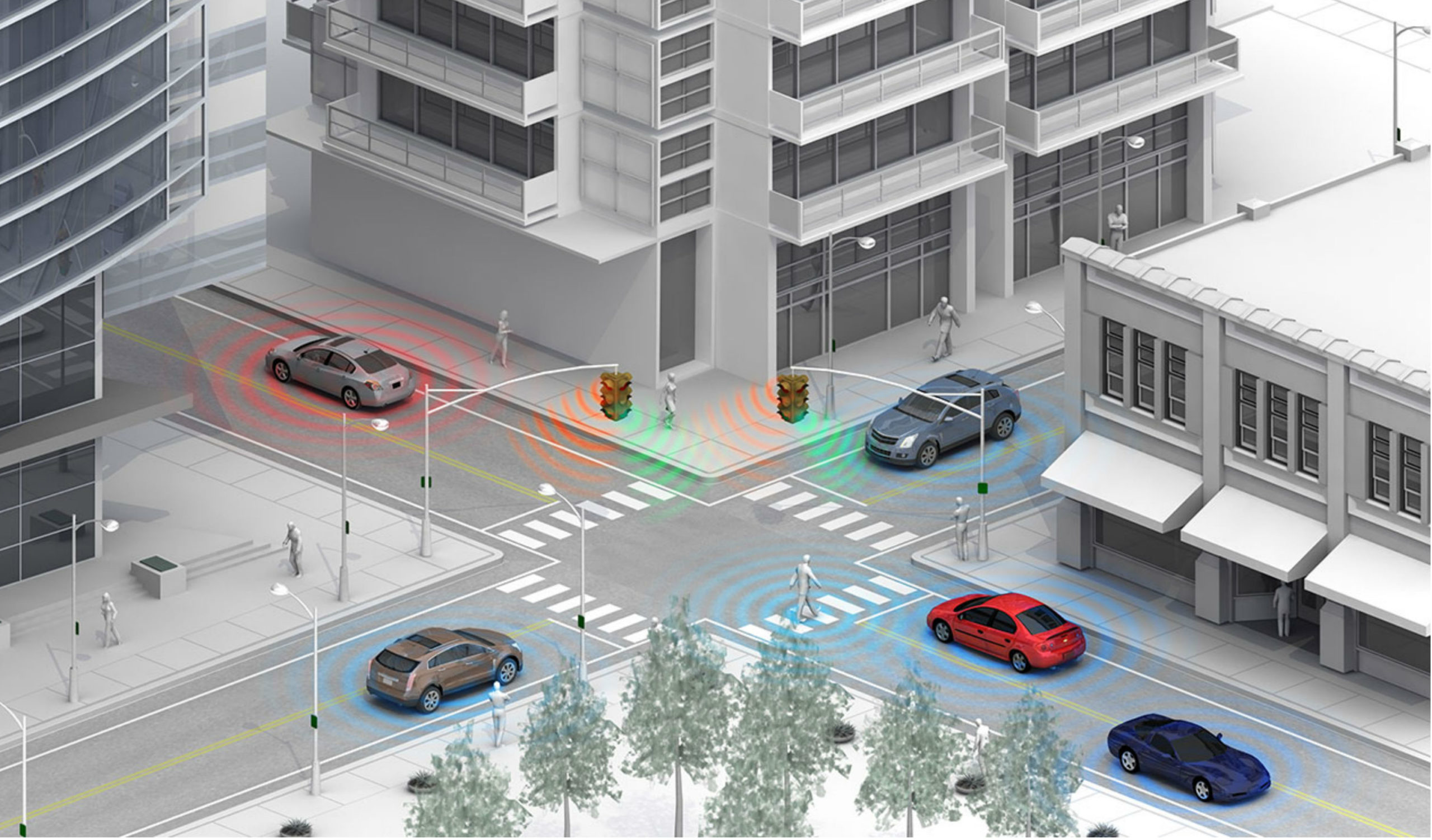
En ville, les feux tricolores avertiront à l’avance les voitures à l’approche pour qu’elles ajustent leur vitesse. Elles seront aussi prévenues par l’infrastructure, grâce à des bornes communicantes, de leur arrivée près d’un passage protégé ou d’un changement de limitation de vitesse. Quant aux piétons et autres cyclistes, ils pourront communiquer leur position aux véhicules, directement via leur mobile ou grâce à un capteur intégré dans leur casque.
Et à terme, c’est la route elle-même qui enverra des informations aux voitures. On envisage en effet d’installer des capteurs directement dans le bitume pour fournir toutes sortes de données. Certains permettront de guider les voitures en émettant un signal électromagnétique. Ce système viendrait en complément de la détection des marquages au sol par les caméras du véhicule, une solution utile notamment en cas d’effacement par endroit. D’autres capteurs préviendront en temps réel les voitures de l’état de la route, par exemple de la formation d’une plaque de verglas. D’autres encore détecteront le passage de chaque véhicule et communiqueront l’information aux voitures dans le but de réguler le trafic.
Dans le futur, tous les acteurs de la route communiqueront entre eux et avec l’infrastructure : véhicules, piétons, feux tricolores et autres équipements…
Vers une coopération en temps réel
Aujourd’hui cependant, force est de reconnaître que la plupart des voitures autonomes testées sur les routes ne communiquent pas avec leur environnement. Prenez les navettes automatiques : elles roulent dans certaines villes, en France notamment, sur des itinéraires bien précis. C’est justement parce qu’elles ne font appel qu’à leurs capteurs qu’elles sont obligées de rouler à vitesse réduite – pas plus de 30 km/h. Quant aux voitures développées par d’autres acteurs, comme Google, certes elles sont dotées d’une cartographie précise à une dizaine de centimètres pour se localiser – en comparant les données des capteurs à la carte embarquée – et compenser les carences de leurs capteurs en cas de besoin.« Mais justement parce qu’elles ne coopèrent pas avec l’infrastructure et les autres voitures, leur cartographie n’est pas dynamique. Or, pour que les voitures puissent rouler en autonomie complète, il faudra que leur carte soit mise à jour en temps réel », note Jean-Marie Bonnin. Pour y remédier, la solution sera précisément de mettre à contribution toutes les autres voitures autonomes qui, parce ce qu’elles seront coopératives, transmettront toute modification de la route (nid de poule, ligne effacée…) qu’elles auront repérée avec leurs capteurs.
Malgré tout, des initiatives pour rendre les véhicules autonomes coopératifs commencent à voir le jour. Sur autoroute, la démonstration a été faite qu’une voiture sans conducteur pouvait passer une barrière de péage – une situation particulièrement compliquée – en communiquant avec celle-ci sur la meilleure trajectoire à prendre. En ville, plusieurs véhicules (navettes et voitures) sont passés avec succès à un feu tricolore en »parlant » avec celui-ci.
Certains voudraient même aller plus loin en matière de coopération avec les équipements routiers. C’est le cas de la start-up française YoGoKo qui développe un boîtier communicant, embarqué dans les véhicules ou installé sur les équipements routiers. « À Rennes, au cours d’une démonstration, nous avons fait communiquer un lampadaire à LED qui détecte un piéton qui s’en approche et informe le feu tricolore et les véhicules de sa présence », confie Thierry Ernst, président de YoGoKo.
Passage à l’échelle
À beaucoup plus grande échelle encore, plusieurs projets, en Europe, aux Etats-Unis et en Asie, testent grandeur nature la coopération des véhicules. Objectif : standardiser les messages à faire passer entre tous les acteurs de la route. Car si les voitures veulent coopérer, elles devront forcément parler une langue commune. Tous ces projets impliquent des voitures conduites par des conducteurs, mais c’est un préalable indispensable pour pouvoir ensuite passer aux voitures autonomes.
Parmi ces initiatives, le projet Scoop est le plus important en Europe. Lancé par la France et cofinancé par l’Union européenne, il vise à connecter entre eux 3 000 véhicules (2 000 voitures de particuliers et 1 000 voitures de gestionnaires routiers) circulant sur 2 000 kilomètres de routes, principalement des autoroutes. Grâce à leurs capteurs ou simplement par l’observation du conducteur, les véhicules détectent certains événements (route glissante, choc, freinage brusque, obstacle sur la route) et transmettent l’information aux véhicules qu’ils précèdent ainsi qu’au gestionnaire via des unités de bord de route. Le gestionnaire peut aussi transmettre des informations (travaux, embouteillage) aux véhicules. « Tout l’enjeu consiste à définir le cheminement de ces messages. Dans le cas d’un freinage d’urgence, vu la criticité de l’événement, l’information doit être transmise directement aux autres véhicules. En revanche, si une voiture signale une plaque de verglas, il est pertinent de faire remonter le message vers le centre de contrôle. Si l’information est confirmée par d’autres, alors on peut envoyer une équipe d’intervention pour saler la route », explique Thierry Ernst, dont la start-up fournit les boîtiers communicants aux véhicules de gestionnaires impliqués dans Scoop.
Cet enjeu est d’autant plus important que dans le futur, les voitures autonomes émettront bien plus d’informations. « L’idée d’envoyer tout vers des serveurs centralisés n’aura pas de sens vu la quantité phénoménale de données à traiter. Il faudra donc localiser au maximum les traitements, surtout ceux avec une forte contrainte de temps réel (voir l’article « Voiture autonome : un déluge de données à interpréter » de notre dossier). Par exemple, la décision d’un ordre de passage des voitures à un carrefour pourrait très bien être prise par les équipements avoisinants, ou même de façon distribuée, par les voitures elles-mêmes », juge Jean-Marie Bonnin.
Autre enjeu : la cybersécurité. Car qui dit voitures communicantes dit possibilité de pirater le système. « Imaginez des personnes mal intentionnées qui se mettent au bord de la route et émettent, à partir de boîtiers, des messages de freinage d’urgence. Cela pourrait bloquer complètement la circulation. Pour éviter ce genre de situation, toute information émise devra être certifiée et signée », avertit Thierry Ernst. Cette notion de certification de l’information est justement au centre de Scoop. De ce point de vue, le projet se distingue d’autres services déjà existants, comme l’appli mobile Waze, qui permet de recevoir en temps réel de la part des autres automobilistes des alertes sur l’état du trafic, mais sans certitude que l’information soit fiable.
Mais cette certification des informations pose problème : si le message est signé, n’importe qui pourrait remonter à l’identité de l’émetteur et traquer le moindre de ses déplacements, ce qui constituerait une atteinte à la vie privée. C’est pourquoi les chercheurs développent aussi des stratégies pour rendre les messages totalement anonymes.
Bref, bien des étapes restent encore à franchir pour rendre les voitures communicantes. Mais le jeu en vaut la chandelle. Car outre le fait d’augmenter la sécurité, la capacité des voitures à coopérer avec leur environnement permettra d’offrir de nouveaux services, en termes de mobilité, surtout dans les villes. « Lorsque tous les moyens de transports dialogueront entre eux, on verra se développer des solutions de transports multimodales personnalisées et sans attente. Et dans ce cadre, la voiture autonome, qui ne sera plus un véhicule de particulier mais un véhicule de service, deviendra un moyen de transport parmi d’autres pour effectuer un bout du chemin entre un point A et un point B. Tout le monde sera gagnant : les usagers qui ne perdront plus de temps et les responsables qui auront décongestionné leur ville », s’enthousiasme Jean-Marie Bonnin.
Julien Bourdet